Detailed design of the Internet of Things vehicle terminal system based on RFID technology
[ad_1]
Today, with the rapid development of information technology, the application of digital information is becoming more and more mature, and various industries optimize the industrial structure and seize the market through it. At present, most of the widely used vehicle-mounted terminals only use the video recording function of the camera, and cannot timely transmit monitoring information back to the monitoring center in time. They are not true real-time remote monitoring terminals and cannot meet the needs of automated operations. With the rapid development of the current logistics industry, the introduction of Internet of Things technology into logistics industry management will play a multiplier role in improving the efficiency of logistics enterprises. The RFID-based Internet of Things vehicle-mounted system introduced in the article is an intelligent system running in a vehicle-mounted terminal. After being installed in a transport vehicle, it uses RFID technology and other dynamic information collection technologies without manual operation. It automatically communicates with the control center to realize the vehicle Control the whole process.
1 Overall system analysis
The Internet of Things vehicle system is developed on the Linux platform with ARM11 embedded processor, using GPS positioning, GPRS communication technology, RFID radio frequency technology, etc. The bottom layer of the vehicle terminal is based on an embedded platform. Embedded software is implanted in the logistics vehicle terminal, and the control program is written to complete the control of other functional modules, thereby achieving the following functions:
1) Complete information transmission in real time;
2) A card reader is implanted in the remote terminal to identify and record the loaded goods;
3) Realize precise positioning of itself throughout the process;
4) Use the camera device to obtain the required image information;
5) Communication with the control center;
2 System hardware design
The logistics vehicle terminal system of the Internet of Things is mainly composed of ARM11 core system, GPS module, GPRS module, RFID identification module, image acquisition module and so on. The system structure block diagram is shown as in Fig. 1.

This system requires real-time transmission, GPS location, RFID identification information, etc., real-time dynamic tracking of vehicles, and comprehensive needs of various aspects. The CPU of the embedded system uses Samsung’s S3C 6410 microprocessor, which has a stable main frequency of 667 MHz and the highest main The frequency can reach 800 MHz, and it integrates many peripheral interfaces. It has the characteristics of high performance and low power consumption. It has a large storage space and strong computing power. It meets the needs of the system for data processing and storage, and realizes each part of the function. .
The GS-91 GES satellite positioning module selected by the GPS positioning module is a high-performance, low-power GPS satellite receiving engine board. It is a complete satellite positioning receiver with all-round functions and positioning accuracy can reach 10 m.
The wireless communication module selects SIM300 module of SIMCOM Company. It is a three-band GSM/GPRS module that can work at three frequencies: EGSM 900 MHz, DCS 1 800 MHz, and PCS 1 900 MHz worldwide. It can provide up to 10 GPRS multi-channel types and supports CS- 1. CS-2, CS-3 and CS-4 4 kinds of GPRS coding schemes, with embedded TCP/IP protocol, you can quickly access the Internet through AT commands.
Nand flash is a storage peripheral. This system stores the video information in nandflash, and at the same time LINUX Uboot, kernel, boot image and file system are also burned in NAND flash.
The remote terminal uses a camera module to complete the image acquisition function. The camera module adopts Vimicro Z301P USB camera. The module is directly connected to the embedded platform through the USB interface. The embedded system stores the image to ensure the security of the data. The collected image information is further compressed and processed by the embedded system and sent to the remote control center through the wireless communication module.
The radio frequency identification module uses nRF24L01 wireless radio frequency module, nRF24L01 is a single-chip wireless transceiver chip working in the 2.4-2.5 GHz universal ISM frequency band, which has extremely low current consumption. The system places the tags on the transported goods, and identifies and manages the goods entering the transport vehicle through the RFID reader on the terminal.
3 System software design
The software system of the logistics vehicle terminal of the Internet of Things selects the embedded Linux operating system as the development platform. First, build the Linux operating system on the PC, and then build the cross-compilation environment. In this process, GPS positioning information, GPRS wireless transmission, image collection, RFID identification information collection, etc. are all written in C language on a PC, and then cross-compiled to generate executable files and run on S3C6410.
3.1 GPS module
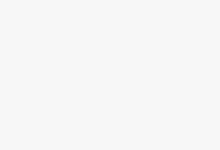
The GPS module program is the key and foundation of this system, which mainly completes the automatic collection of latitude and longitude, vehicle speed, acceleration, altitude, azimuth and other information. After opening the device, firstly need to initialize the serial port, set the baud rate, data bit, stop bit, parity bit and other parameters, then open the serial port to read the original GPS information, and finally call the function gps_phame(char*line, GPS_INF0*GPS); Analyze GPS information. The processing flow of the module program is shown in Figure 2.
3.2 GPRS module
The GPRS module program is the key and foundation for realizing remote wireless networking and real-time data communication. It mainly completes interactive data communication, short message reception and sending, online data update, and remote command control of the dispatch center. In order to take into account the functions of data communication and SMS sending and receiving, the GPRS module does not use the TCP/IP transparent transmission mode, but works in the AT command mode. The data communication adopts the TCP/IP protocol, the communication format is a custom PDU double-byte encoding mode, and the SMS adopts International general standard PDU data format.
3.3 Itinerary playback
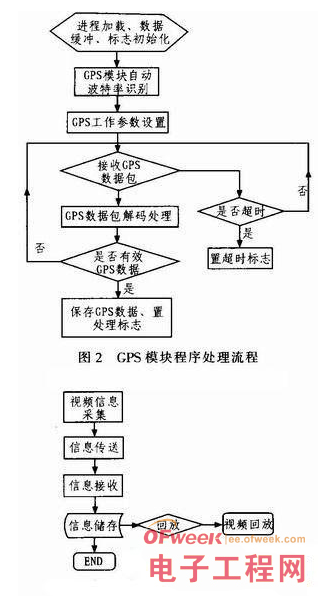
This system can locate the vehicle in real time, and store the driving route in nand flash at the same time, while the video information is collected in the vehicle terminal, and the video information can also be stored in nand flash, and the driving route information can be selected to be played back, as shown in Figure 3. .
3.4 Image acquisition module
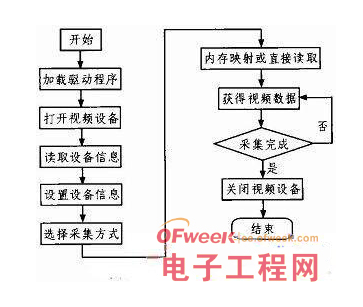
This system uses Linux2.6.36 kernel, which uses UVC driver v412 (short for video4linux2) framework. v412 provides a set of interface specifications for Linux video equipment programs, including a set of data structures and the underlying v412 driver interface. The processing flow of image acquisition is shown in Figure 4.
3.5 Collection of identification information
nRF24L01 communicates with the Linux system through the UART serial port. It can receive 6 different channels of data in the receiving mode. The nRF24L01 set to the receiving mode can identify these 6 transmitters. The nRF24L01 records the address after confirming the received data. The address is the target address to send the response signal, and the data channel 0 at the sending end is used to receive the response signal.
The initialization code of nRF24L01 is as follows:
4 Results and analysis
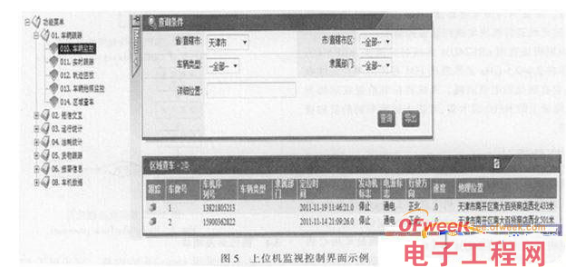
The upper computer monitoring and control operation interface of this system is developed in Java language. The management platform combines GIS information to display the geographic location of the currently monitored vehicle in real time, so as to query relevant information and conduct effective supervision. An example of the interface is shown in Figure 5.
5 concluding remarks
In this paper, a vehicle-mounted terminal system for the Internet of Things based on RFID technology is proposed. The embedded Linux operating system and S3C6410 processor are selected as the software and hardware platforms, and the prototype is successfully developed. Real-time remote monitoring of the vehicles of logistics enterprises improves logistics efficiency and saves logistics costs; through functions such as vehicle positioning and vehicle condition information monitoring, the entire process of vehicle driving is monitored to improve driving safety. The use of RFID-based IoT logistics vehicle-mounted terminals introduces advanced logistics management concepts into the production and operation process. At the same time, because the system uses a wireless network, real-time communication with the control center can be achieved as long as the GPRS network covers the range. The realization of real-time accurate positioning monitoring has very practical value.
[ad_2]