[ad_1]
Indoor positioning technology solution
1. Principle of indoor positioning system
Domestic conventional positioning technologies include Wifi positioning, RFID positioning, Bluetooth positioning, Zigbee positioning and other methods. What are the differences between these types of positioning methods? What are the advantages and disadvantages of each? Below we will analyze in detail the principles, advantages and disadvantages of these types of positioning. Your organization’s reference.
First of all, we must make it clear that Wifi positioning, RFID positioning, and Bluetooth positioning are just different data transmission methods. The user chooses the wifi positioning tag to call it wifi positioning, the RFID positioning tag to call it RFID positioning, and the Bluetooth ibeacon tag to call it Bluetooth positioning. Here focuses on the positioning principle and positioning pros and cons to analyze Wifi positioning, RFID positioning, and Bluetooth positioning. The effect of positioning depends on the core positioning algorithm of the back-end, and the front-end is just the difference in data transmission methods. At present, the commonly used positioning methods for indoor positioning are mainly divided into seven types in principle: proximity detection method, centroid positioning method, multilateral positioning method, triangulation positioning method, pole method, fingerprint positioning method and dead reckoning algorithm.

Different indoor positioning methods select different observations, and extract the information needed by the algorithm through different observations. The following table gives a brief introduction to the main observations.

Based on the positioning principles and observations introduced above, a variety of indoor positioning technologies have been derived. The mainstream indoor positioning technologies will be briefly introduced below.
1. WiFi positioning technology
At present, WiFi is a relatively mature technology with many applications. In recent years, many companies have invested in this field. There are two main types of WiFi indoor positioning technologies. WiFi positioning generally uses the “nearest neighbor method” to determine which hot spot or base station is closest to, that is, where it is considered to be. If there are multiple sources nearby, cross positioning (triangulation) can be used to improve positioning accuracy.
As WiFi has become popular, there is no need to lay special equipment for positioning. Users who have turned on Wi-Fi and mobile cellular networks when using their smartphones may become data sources. This technology has the advantages of easy expansion, automatic update of data, and low cost, so it is the first to achieve scale.
However, WiFi hotspots are greatly affected by the surrounding environment and have lower accuracy. In order to be more accurate, some companies have done WiFi fingerprint collection, recording the signal strength of a huge number of determined locations in advance, and determining the location by comparing the signal strength of the newly added device with a database with huge amounts of data.
Because the collection work requires a large number of personnel to carry out and regular maintenance, the technology is difficult to expand, few companies can update the fingerprint data of so many domestic shopping malls on a regular basis. In particular, data collection is greatly affected by the environment, especially for personnel positioning. Due to the large changes in the environment, the phenomenon of positioning drift is particularly serious.
Pain points of wifi positioning:
WiFi positioning can realize complex wide-range positioning, facilitate networking, and is easy to set up on existing wireless wifi networks. WiFi positioning can be used in various occasions where positioning and navigation are required, such as medical institutions, theme parks, factories, and shopping malls. There are also obvious pain points in Wifi positioning, which are mainly manifested in the following aspects:
1) The wifi label used for wifi positioning is a non-standard design, but the data format refers to the 802.11b format, and the standard wifi protocol is not supported. The wireless router does not support the function of scanning the wifi tag, and the router needs to be developed again, that is, the wifi tag scanning firmware is loaded on the router. Some wireless routers support the wifi scanning function, which can obtain the MAC address of the wifi tag, but other functions defined by the wifi tag are not supported. Such as wireless sensor, button call, low battery alarm, etc. These are non-standard protocols, and standardized routers do not support non-standard protocols.
2) The power consumption of the wifi tag is large, the continuous emission current is above 200ma, and the battery life limits the popularization and use of the wifi positioning tag.
3) The cost of wifi tags is relatively high, which is not conducive to the large-scale promotion of commercial use.
4) There is a serious co-frequency interference problem in wifi positioning, and the systems will affect each other.
2. RFID positioning
The basic principle of RFID positioning is to read the characteristic information (such as identity ID, received signal strength, etc.) of the target RFID tag through a set of fixed readers, and the nearest neighbor method, multilateral positioning method, received signal strength and other methods can also be used to determine the tag. location.
This technology has a short range of action, generally up to several tens of meters. But it can get centimeter-level positioning accuracy information within a few milliseconds, and the transmission range is large and the cost is low. At the same time, due to its non-contact and non-line-of-sight advantages, it is expected to become the preferred indoor positioning technology.
At present, the hotspots and difficulties of radio frequency identification research are the establishment of theoretical propagation models, user security and privacy, and international standardization. The advantage is that the size of the logo is relatively small, the cost is relatively low, but the operating distance is short, it does not have the communication capability, and it is not easy to integrate into other systems, and cannot achieve precise positioning. The deployment of card readers and antennas requires a lot of engineering practice. Experience is difficult.
Shanghai Netband successfully applied the wifi positioning technology to the active RFID positioning system, focusing on solving the unique problems of wifi positioning, and realizing the accurate indoor positioning of active RFID. The background positioning algorithm integrates the nearest neighbor positioning method, multilateral positioning method, triangulation positioning method, fingerprint positioning method, path trajectory method, etc. In particular, it is difficult to deploy card readers and antennas for RFID positioning. A lot of practical engineering experience is required. Network frequency has introduced wireless beacon positioning, which not only is easy to implement, but also greatly reduces equipment costs. RFID beacon positioning method is easy to implement, low cost, combined with network frequency positioning server algorithm, positioning accuracy is much better than traditional RFID regional positioning, and is expected to become the preferred indoor positioning technology.
3. Infrared technology
Infrared is an electromagnetic wave with a wavelength between radio waves and visible light waves. There are mainly two specific implementation methods for infrared positioning. One is to attach an electronic tag that emits infrared rays to the positioning object, and measure the distance or angle of the signal source through multiple infrared sensors placed indoors to calculate the location of the object.
This method is easy to achieve high accuracy in an open room and can achieve passive positioning of infrared radiation sources, but infrared is easily blocked by obstacles and the transmission distance is not long. Therefore, a large number of densely deployed sensors are required, resulting in high hardware And construction costs. In addition, infrared is susceptible to interference from heat sources, lights, etc., resulting in a decrease in positioning accuracy and accuracy.
This technology is currently mainly used for passive positioning of infrared radiation sources such as aircraft, tanks, and missiles in the military, and it is also used for the position positioning of indoor self-propelled robots.
Another infrared positioning method is the infrared weaving net, that is, the infrared net woven by multiple pairs of transmitters and receivers covers the space to be measured and directly locates the moving target.
The advantage of this method is that it does not require any terminal or tag to be carried by the positioning object, and is highly concealed, and is often used in the security field. The disadvantage is that a large number of infrared receivers and transmitters need to be deployed to achieve high-precision positioning, and the cost is very high. Therefore, only high-level security will use this technology.
4. Ultrasonic technology
Ultrasonic positioning currently mostly adopts the reflective ranging method. The system consists of a main rangefinder and several electronic tags. The main rangefinder can be placed on the body of the mobile robot, and each electronic tag is placed in a fixed position in the indoor space.
The positioning process is as follows: First, the host computer sends a signal of the same frequency to each electronic tag, and the electronic tag is received and then reflected and transmitted to the main rangefinder, so that the distance between each electronic tag and the main rangefinder can be determined, and get Positioning coordinates.
At present, there are two more popular technologies based on ultrasonic indoor positioning: one is to combine ultrasonic and radio frequency technology for positioning. Since the transmission rate of the radio frequency signal is close to the speed of light, which is much higher than the radio frequency rate, the radio frequency signal can be used to activate the electronic tag first and then make it receive the ultrasonic signal, and use the time difference method to measure the distance. This technology has low cost, low power consumption and high accuracy. The other is multi-ultrasonic positioning technology. This technology adopts global positioning, which can install 4 ultrasonic sensors in 4 directions on the mobile robot, divide the space to be positioned, and form coordinates by ultrasonic sensors. The overall data is grasped. It has strong anti-interference, high precision, and can solve the robot. The problem of getting lost.
Ultrasonic positioning accuracy can reach centimeter level, and the accuracy is relatively high. The defect is that the ultrasonic attenuation is obvious during the transmission process, which affects the effective range of its positioning.
5. Bluetooth technology
Bluetooth positioning is based on the RSSI (Received Signal Strength Indication) positioning principle. According to different positioning terminals, Bluetooth positioning methods are divided into network-side positioning and terminal-side positioning.
The network-side positioning system is composed of terminals (mobile phones and other terminals with low-power Bluetooth), Bluetooth beacon nodes, Bluetooth gateways, wireless local area networks and back-end data servers. The specific positioning process is:
1) First, lay beacon and Bluetooth gateways in the area.
2) When the terminal enters the coverage of the beacon signal, the terminal can sense the broadcast signal of the beacon, and then calculate the RSSI value under a certain beacon and transmit it to the back-end data server through the Bluetooth gateway through the wifi network, and calculate it by the built-in positioning algorithm of the server The specific location of the terminal.
The terminal-side positioning system consists of a terminal device (such as a mobile phone embedded with an SDK software package) and a beacon. The specific positioning principle is:
1) First, lay out Bluetooth beacons in the area
2) The beacon continuously broadcasts signals and data packets to the surroundings
3) When the terminal device enters the coverage area of the beacon signal, measure its RSSI value under different base stations, and then calculate the specific location through the built-in positioning algorithm of the mobile phone.
Terminal-side positioning is generally used for indoor positioning and navigation, precise location marketing and other user terminals; while network-side positioning is mainly used for personnel tracking and positioning, asset positioning, and passenger flow analysis. The advantage of Bluetooth positioning is that it is simple to implement, and the positioning accuracy is closely related to the laying density and transmit power of the Bluetooth beacon. And it is very power-saving, which can be achieved through deep sleep, no connection, simple protocol and other methods.
6. Inertial navigation technology
This is a pure client technology, which mainly uses the motion data collected by the terminal inertial sensors, such as acceleration sensors, gyroscopes, etc. to measure the speed, direction, acceleration and other information of the object. location information.
As the walking time increases, the errors of inertial navigation positioning are also accumulating. It needs to be calibrated by an external data source with higher accuracy. Therefore, inertial navigation is generally combined with WiFi fingerprints, and the indoor position is requested through WiFi every time, so as to correct the errors generated by the MEMS. The current commercial availability of this technology is relatively mature, and it is widely used in sweeping robots.
7. Ultra-wideband (UWB) positioning technology
Ultra-wideband technology is a brand new wireless communication technology that is very different from traditional communication technology in recent years. It does not need to use the carrier wave in the traditional communication system, but transmits data by sending and receiving extremely narrow pulses below the order of nanoseconds or microseconds, thus having a bandwidth of the order of 3.1 to 10.6 GHz. At present, countries including the United States, Japan, Canada, etc. are studying this technology, which has a good prospect in the field of wireless indoor positioning.
UWB technology is a wireless technology with high transmission rate, low transmit power, strong penetration capability, and is based on extremely narrow pulses, without carrier. It is these advantages that make it obtain more accurate results in the field of indoor positioning.
Ultra-wideband (UWB) positioning technology uses pre-arranged anchor nodes and bridge nodes with known locations to communicate with newly added blind nodes, and uses triangulation or “fingerprint” positioning methods to determine the location.
Ultra-wideband can be used for precise indoor positioning, such as location discovery of soldiers on the battlefield, robot movement tracking, etc. Compared with the traditional narrowband system, the ultra-wideband system has the advantages of strong penetration, low power consumption, good anti-interference effect, high security, low system complexity, and can provide precise positioning accuracy. Therefore, the ultra-wideband technology can be applied to the positioning, tracking and navigation of indoor stationary or moving objects and people, and can provide very precise positioning accuracy. According to different technical methods or algorithms used by different companies, the accuracy can be maintained at 0.1 m~0.5 m.
In addition to the above, there are dozens or even hundreds of types of positioning technologies, and each positioning technology has its own advantages and disadvantages and suitable application scenarios, and there is no absolute difference between victory and defeat. It is the best policy to deploy solutions tailored to local conditions according to different needs.
The use of the wireless beacon locator in this system not only makes project implementation and maintenance more convenient, but also greatly reduces equipment costs. The user needs to improve the positioning accuracy, and only needs to appropriately increase the positioning beacon. The backstage adopts accurate triangulation algorithms based on signal strength to locate RFID personnel and assets. The characteristics of this system are the low complexity of the electronic system, easy implementation and low cost; high positioning accuracy and strong anti-interference ability. The system can be used for wifi indoor positioning, RFID indoor positioning, Bluetooth indoor positioning and Zigbee indoor positioning, etc.
2. RFID beacon positioning solution
1. The composition of the beacon positioning system
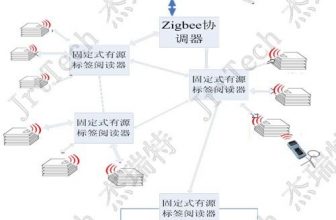
The beacon positioning system consists of RFID electronic tags, RFID long-distance readers, RFID beacons and positioning servers. The system architecture diagram is as follows:

Description: The locator uses RFID wireless beacons to replace RFID readers. RFID beacons integrate RFID tag readers and data relay functions to receive 2.4G active RFID tag information and send it wirelessly to 433M beacons via 433M. The reader locates the base station. The positioning base station sends the data to the background positioning server via wireless wifi or Ethernet. The receiving frequency band is 2.4G, the communication distance with the tag is 50 meters to 90 meters, the transmission frequency band is 433M, and the communication distance with the positioning base station is 200 meters.
2. Realization of beacon positioning system
The RFID beacon positioning system of Shanghai Net Frequency Electronic Technology Co., Ltd. has introduced foreign wifi indoor positioning technology, and the back-end positioning server integrates indoor positioning algorithms such as nearest neighbor positioning, multilateral positioning, triangulation, fingerprint positioning, and path trajectory. The front end adopts active RFID electronic tags with lower cost and lower power consumption. The RFID positioning beacon receives 2.4G active RFID electronic tags and sends them to the 433M RFID beacon reader to locate the base station through the 433M frequency. Project implementation is more convenient, easier to maintain, lower cost, and higher positioning accuracy. The core performance of the Wifi-rfid indoor positioning system is the positioning server software integrated with the core algorithm of signal strength triangulation positioning. The location server is a server running program, which is mainly used for communication with tags, including receiving and sending instructions and calculation of tag real-time positioning. It also provides a standard API interface for third-party secondary development. The positioning server is the cornerstone of the operation of the entire real-time positioning system. The positioning server provides a core positioning algorithm based on signal strength RSSI, combined with signal strength binding and signal strength fingerprint sampling, to provide rfid tag location information with a positioning accuracy of 3 to 5 meters.
It should be pointed out that the positioning engine is essentially a positioning algorithm. Our company uses RSSI signal strength positioning, core triangulation positioning algorithm, special interference processing algorithm, and fingerprint recognition sampling algorithm. The positioning server software can be used for WIFI personnel positioning, RFID personnel positioning, Zigbee personnel positioning, Bluetooth personnel positioning, etc. That is to say, the physical transmission layer can adopt different schemes, as long as the locator, the MAC address or ID number of the positioned object and the obtained signal strength value are transmitted to the server, the real-time positioning can be achieved.
Main functions of location server:
1) Real-time communication with the tag: After the positioning server receives the instruction content of the control tag sent from the tag manager and the positioning monitor, it converts it into a data packet that the tag can identify, and sends it to the tag to achieve the function of controlling the tag. Receive the data sent by the tag, receive the wireless signal data sent by the tag, and information such as temperature. After analysis, save it in the system.
2) Calculate the location of the tag: According to the saved wireless signal data of the tag, analyze the coordinate point of the location of the tag, save it in the system, and display it on an electronic map.
3) Secondary development standard API interface: the secondary development standard API interface opened for other applications to call the function of the positioning server. Through API, the positioning server can be easily integrated into other applications. Conveniently realize system expansion and system integration. API can be used for tag parameter setting, tag data collection, tag location information, tag alarm information.
Positioning monitor: Positioning monitor is a WEB-based positioning management platform, no client software is required, simple deployment and easy operation. The location monitor integrates monitoring, query, and collection of location information. Combined with the actual map, the location of the tag and the historical movement of the track can be displayed in real time on the map. It can also determine whether the tag has disappeared and whether it triggers corresponding warnings and other information. After the personnel and assets wear or bind tags, the positioning monitor can automatically monitor the real-time location of the assets or personnel, and perform real-time positioning and management of the personnel and assets intuitively and visually.
The main functions of the positioning monitor:
1) User management: Display all user information, set and manage basic user information.
2) Real-time positioning: The first independent research and development in China, the original positioning algorithm, the real-time position of the accurate positioning tag can reach 3-5 meters.
3) Area alarm: The server can set the alarm area. When the tag enters or exits the alarm setting area, the server area alarm function will be triggered.
4) Instant alarm: The tag actively sends an alarm signal to the server, and the server interface displays the alarm information in real time.
5) Disappearance alarm: If the tag is powered off or the tag goes out of the wireless network coverage area, the server alarm will be triggered.
6) Historical track analysis: The server can replay the running track of the tag and analyze the historical location information of the tag.
7) Wireless sensor: By setting the number of temperature, humidity, gas density, pressure, vibration, etc., exceeding the number will trigger the wireless sensor control function of the server.
8) Map management: According to the operating status of the label, the electronic map of the location of the label can be automatically switched.
3. Description of WIFI-RFID beacon positioning system
1) Description of positioning accuracy
System positioning accuracy: Depends on the positioning algorithm and locator deployment, usually the positioning accuracy is 3 to 5 meters. If higher positioning accuracy is required, more locator nodes need to be deployed. The positioning accuracy is related to the deployment of base stations and wireless beacons. If you want an accuracy of 5 meters, it is best to deploy a base station or beacon every 10 meters. In the case of low requirements, the number of locators can be appropriately reduced, and fingerprint sampling of the environment can be used. It needs to be specifically pointed out that the positioning accuracy has nothing to do with wifi transmission, Zigbee transmission, RFID transmission, etc. The positioning accuracy depends on the core algorithm of the positioning server and the deployment of the locator.
2) Locator deployment
The positioning of the locator needs to be combined according to the customer’s positioning requirements and the actual site. If you want an accuracy of 5 meters, it is recommended to deploy a locator every 10 meters. The locator can be a base station or a wireless beacon. Positioning can use fingerprint recognition to sample RSSI signal strength at different locations. The advantage of sampling can improve the positioning accuracy, but the disadvantage is that the amount of work is large, the sampling value and the actual value are often inconsistent, and the environmental impact is relatively large. The environment has changed and needs to be re-sampled. In addition, when sampling, the direction of people and objects will affect the positioning effect, so it is easy to drift. In places with little impact on the environment, sampling can be used to improve positioning accuracy.
3) What are the advantages and disadvantages of the WIFI-RFID real-time positioning system and the existing WIFI positioning
The WIFI tag is actually an active RFID tag, which is designed with an MCU plus a wireless transceiver chip. Different modulation methods and data structures, without WIFI protocol, cannot be read by ordinary wireless APs. The WIFI-RFID real-time positioning system focuses on solving the following problems:
1) The label power consumption is lower, under the same conditions, the label power consumption is only one part of the WIFI label;
2) Lower cost, saving at least half of the cost;
3) The system is more reliable. It integrates WIFI system and RFID system. There is serious co-frequency interference in WIFI positioning. The frequency band of this system has avoided the commonly used 2.4G wireless signal, especially the wireless WIFI frequency band, and adopts wireless frequency hopping design. There will be no electromagnetic interference, and the system is more stable.
4) The existing Wi-Fi positioning technology does not support wireless beacon positioning and can only use Wi-Fi base stations, so the cost is high, which is not conducive to large-scale promotion. The network frequency WIFI-RFID real-time positioning system supports rfid beacon positioning, the system equipment cost is greatly reduced, and the stability and wireless anti-interference ability are stronger.
5) WIFI positioning usually adopts signal strength fingerprint recognition method to locate, and RSSI fingerprint sampling is required on the scene. Due to the great impact of the environment, the positioning drift phenomenon is very serious. And once the environment changes, re-sampling is required. In addition, the use of fingerprint sampling methods, continuous use of fingerprint matching and comparison, increased server operations, and high requirements on the server. The network frequency WIFI-RFID positioning system introduces the rfid beacon as the locator node, and the physical node replaces the fingerprint, which basically eliminates the drift phenomenon. At the same time, it also supports fingerprint recognition, sampling and positioning.
4. Indoor positioning system tool software
1) Scenario planning software
Sampling positioning tool software designed for deployment in system scenarios. Use this software to deploy the location, AP, positioning point and other functions of the positioning system, load the map, set the trajectory route; perform sampling management on the sampling point of the system positioning card, upload it to the server, and achieve the positioning purpose.
The main function:
1) Site management: Set up multiple sites, each scene of each site, location point information, map distribution AP, map area, map track map information.
2) Locator management: add or delete AP locators on the map.
3) Label management: increase sampling labels.
4) Sampling management: Set the actual sampling group, scene, anchor point, sampling point, and label binding information.
2) Locator management software
The locator management software is a management software that specializes in managing and monitoring the locator in the positioning system. It can monitor the operation status of the remote locator and deploy debugging tool software on site.
The main function:
1) AP Locator list: You can add, modify, and delete APs in the list, and filter the APs in the list according to conditions such as MAC addresses, and implement batch operations on APs.
2) Configure AP: Configure AP parameters in batches. The configurable parameters include: SSID, Channel, IP, DHCP, MAC filtering, etc.
3) Set the basic information of the AP: In order to facilitate the management of the AP, set some management information for the AP (such as MAC, login name, password, etc., this information is only saved in the database, not written to the AP).
4) View the scan of the locator: View the scanning signal strength returned by the AP to help users adjust the deployment of the locator and optimize the positioning effect.
5. Features of wifi-rfid indoor positioning system:
1) It can be set up on an existing wireless local area network, and the installation and implementation are flexible, convenient and quick; the positioning tag can be placed on any asset and personnel to achieve real-time and accurate positioning of assets and personnel.
2) Ultra-low power consumption, ordinary button battery 500mAH, the tag is launched once per second, and the battery life can reach more than 3 years.
3) Lower equipment cost, including positioning tags and locators. Much lower than the wifi positioning system, suitable for large-scale commercial promotion.
4) Long-distance recognition, indoor and outdoor positioning, using RSSI field strength positioning, with an accuracy of 3 to 5 meters.
5) The system is more stable and reliable, and there is no problem of wifi positioning co-frequency interference.
6) RFID positioning beacons make the implementation and maintenance of the system more convenient, and greatly reduce the cost of system equipment.
7) High reliability, working temperature -30℃~75℃, waterproof and dustproof, and work normally for 24 hours in harsh environments.
[ad_2]