Vehicle distance monitoring and early warning system based on RFID and satellite navigation technology
[ad_1]
introduction
Automobiles have made outstanding contributions to the development of human society, but they have also brought shocking damage. In recent years, with the development of expressways, the speed of cars has increased, and vicious traffic accidents have occurred frequently. Rear-end collisions account for 25% of fatalities caused by car accidents. Therefore, research on the distance monitoring and early warning system that can obtain road and vehicle information at any time and promptly remind car drivers to take measures to avoid danger has become an important means to solve road traffic safety problems.
This article is based on RFID and satellite navigation technology to achieve mutual communication between vehicles, by reporting accurate geographic information of the vehicle to surrounding vehicles, and obtaining geographic information sent by surrounding vehicles, real-time calculation and acquisition of vehicle distance.
Compared with other implementations such as radar ranging, this solution has the advantages of low cost, simple structure, and high accuracy.
1 Introduction to RFID and satellite navigation technology
RFID technology first appeared during World War II when it was successfully applied to the identification friend or foe system of aircraft. It has now developed into one of the most important technologies in the 21st century. The basic principle is to use the spatial coupling (inductive or electromagnetic coupling) or reflected transmission characteristics of the radio frequency signal to realize the automatic identification of the identified object.
Satellite navigation technology was first applied to the Global Positioning System (GPS) jointly developed by the United States Army, Navy and Air Force in the 1970s, and it has now been used globally for civilian use. Since the position of the satellite is accurately known, in GPS observation, we can get the distance from the satellite to the receiver. Using the distance formula in three-dimensional coordinates, using 3 satellites, we can form 3 equations to solve the position of the observation point (X , Y, Z) to realize the determination of the position of the object.
2 The overall design of the system
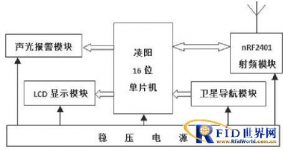
The system design includes a single-chip microcomputer control module, radio frequency communication module, satellite navigation module, liquid crystal display module, sound and light alarm module and stabilized power supply module. The system uses LM1575 chip to convert vehicle 12V power supply to 5V power supply. With Sunplus SPCE061A 16-bit microcontroller as the control center, nRF2401 wireless radio frequency transceiver module is used for data transmission and reception, and OTrack-32 Beidou/GPS/GLONASS multi-mode compatibility is used. The navigation chip module realizes the acquisition of the latitude and longitude coordinates, and uses the 12864 LCD display module to display the vehicle distance detection information in real time, and uses the buzzer and LED to realize the sound and light alarm. The system block diagram is shown as in Fig. 1.

Figure 1 The overall framework of the system
When the system is working, it first obtains the precise latitude and longitude information of the vehicle through the satellite navigation chip, and then encodes the information.The coding information mainly includes the vehicle identification serial number, latitude and longitude information and vehicle speed[3]. After the information is encoded, the encoded information is sent through channel 1 of the radio frequency transceiver module. The receiving address should be set to a unified public address. This design specifies a 5-digit hexadecimal address: 0xAAAAA. At the same time, channel 2 is used to receive the information sent by the surrounding vehicles, and the received information is sent to the single-chip microcomputer for processing.
When a communication collision occurs when receiving information sent by multiple radio frequency modules at the same time, the RFID anti-collision algorithm is used for processing. The single-chip microcomputer continuously receives the vehicle identification serial number, latitude and longitude information and vehicle speed from the radio frequency transceiver module, and performs data structure queue sorting processing on these information according to the vehicle serial number.
Obtain the driving direction and distance of each car around in real time through the car distance and speed measurement algorithm and the car driving direction determination algorithm. Compare the distance between the surrounding vehicles and the safe distance corresponding to different vehicle speeds. When the distance between the vehicles is less than the safe distance, the driver will be alerted by sound and light.
3 System hardware design
3.1 Microcontroller
SPCE061A is a 16-bit micro-controller produced by Taiwan Sunplus Technology. It uses the μ’nSPTM series of single-chip cores, embedded 32k words of flash memory, and has a high processing speed. It can not only be used in the traditional control field, It can also be extended to control processing, data processing, digital signal processing and other fields, and has a wide range of applications. This system uses Sunplus MCU as the control center to realize the control of radio frequency transceiver module, satellite navigation module, LCD display module and sound and light alarm.
3.2 RF transceiver module
The nRF2401 chip is a single-chip wireless radio frequency transceiver chip that works at 2.4GHz, which can realize one-channel data transmission and two-channel data reception functions at the same time.
It integrates radio frequency, 8051MCU, 9-channel 12-bit ADC, peripheral components, inductors and filters in a single chip, with very low power consumption, output power and communication channels can be configured through programs, and a wide range of applications. The nRF2401 module with nRF2401 chip as the core used in this design has two sets of interfaces, which respectively use interface 1 to send data; interface 2 to receive data, so as to realize the two-way transmission of information.
3.3 Satellite navigation module
The satellite navigation module required by this system adopts the satellite navigation chip Otrack-32 produced by Beijing Orient United Star, which can receive signals from Beidou-2, GPS, and GLONASS satellites at the same time to realize multi-system joint navigation positioning, speed measurement, and timing. The Otrack-32 chip realizes the world’s fastest 1s hot start, the world’s shortest 35s cold start, and stable 1s reacquisition; true value positioning up to 20 times per second; positioning accuracy of 5m; differential positioning accuracy of 0.5m; high Reliable and anti-interference; adapt to harsh environments; passed strict ground tests and various carrier dynamic tests. The Otrack-32 chip provides fully localized high-performance core devices for professional navigation fields such as navigation, measurement, and timing.
3.4 12864 LCD module
This system adopts 12864 dot matrix LCD display module, which can display related information such as surrounding vehicles, minimum distance between vehicles, longitude and latitude of the vehicle. The dot-matrix LCD display module can not only display common characters, but also graphics and Chinese characters.
The 12864LCD display module displays 128 points in the horizontal direction and 64 points in the vertical direction. It can display up to 16×16 Chinese characters in 4 rows and 8 columns at the same time, which can meet a large amount of information display needs. The module pin connection is shown as in Fig. 2.
[ad_2]