[ad_1]
In the process of movement, the wheelchair not only needs to accept the user’s instructions, but also needs to combine environmental information to activate its own obstacle avoidance, navigation and other functional modules. Unlike mobile robots, the wheelchair and the user become a cooperative system during use. This requires that the human factor should be taken into consideration at the beginning of the design. Therefore, safety, comfort and ease of operation should be the most important factors in the design of smart wheelchairs; the difference in the physical capabilities of users determines that smart wheelchairs need to be designed as An electronic system with diversified functions that can meet the needs of multiple levels, and modularity can best reflect the multi-functional characteristics of the system. Each user can choose the appropriate module integration according to his own disability type and degree, and the designer can By adding functional modules on the existing basis, it is convenient to improve the functions of the wheelchair.
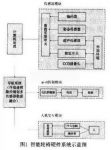
The total functions of the smart wheelchair can be divided into the following sub-functions: environment perception and navigation functions, control functions, driving functions and human-computer interaction functions. Through the functional analysis and module division of the smart wheelchair, combined with specific research content and expected control objectives, this system is mainly composed of three parts: sensor module, drive control module and human-computer interaction module. The hardware system structure is shown in Figure 1. The sensor module is mainly composed of internal state perception and external environment perception. The position and posture information of the wheelchair is determined by the attitude sensor; the self-positioning information is obtained by the displacement speed and distance of the encoder; the vision, ultrasonic and proximity switches are mainly responsible for continuous acquisition Distance information of the surrounding environment and obstacles. The drive control module adopts the rear-wheel drive mode, and each rear wheel is equipped with an electric motor, which realizes the forward, backward and steering of the electric wheelchair under the operation of the controller. The human-computer interaction interface has two ways of data input by the joystick and the personal computer interface to realize the basic human-computer interaction function.

The smart wheelchair has 2 independent driving wheels, each equipped with a motor code disc. The real-time detection data of the two motor code discs constitutes an odometer-type relative positioning sensor. At the same time, an inclination sensor and a gyroscope are installed to measure the posture state of the wheelchair during the travel. Ultrasonic sensors and proximity switches are used to perceive information about the surrounding environment. In order to obtain obstacle information in a larger range, the system is equipped with 8 infrared sensors and 8 ultrasonic sensors. In addition, a CCD camera is installed for judging the depth information in the forward travel distance.
The balance of the car body can be completed by only relying on two wheels. This remarkable feature requires it to have a special structure. The basic design idea is to keep the two wheels driven by independent DC motors, and on an axis, the center of gravity of the car body is kept above the axle, and the inclination angle of the car body is detected. The sensor acquires the posture information of the car body in real time, and the processor of the robot processes the sensor signal and calculates the control quantity to control the speed and steering of the motor according to a certain control algorithm, drives the robot forward or backward, and completes the balance of the car body.
The smart wheelchair uses a combination of an inclination sensor and a gyroscope to form an attitude sensor to detect the running attitude of the vehicle body platform. The inclination sensor is used to measure the angle that the wheelchair deviates from the vertical direction, and the gyroscope is used to measure the angular velocity.
[ad_2]