[ad_1]
From ancient times to the present, all aspects of mankind have been inseparable from “positioning” technology. From the ancient ocean navigation compass to the GPS that every electronic terminal has now, positioning technology can be said to be ubiquitous around us. However, human beings have evolved into animals living in reinforced concrete forests. They spend much more time working and living indoors than outdoors, and there are also positioning and navigation needs indoors. At present, the positioning technology in the city is mainly divided into three methods: RSSI perception positioning, RTLS real-time coordinate-level positioning, and inertial navigation positioning.

RSSI perception positioning technology
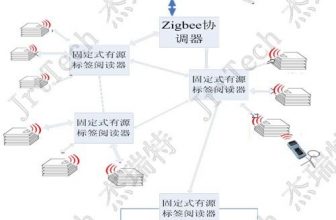
RSSI-based positioning technology mainly includes: active RFID, ZigBee, WiFi, Bluetooth iBeacon, etc., and their common features are 2.4GHz frequency band based on field strength signal strength detection and fingerprint collection (collecting multiple location signal strength reference values) Perceptual judgment, get relative position, but no positioning coordinates.
It is worth mentioning that the current hotter is the iBeacon camp, which uses BLE technology and periodically sends notification frames that can be received by devices that support BLE. The reference receiving signal is strong when the distance between the module and the receiver is 1m, the receiver The distance between the sending module and the receiver is calculated based on the reference RSSI and the strength of the received signal. The application market of products based on RSSI positioning technology is mainly aimed at ordinary personnel positioning and commercial consumption positioning, such as home-school student management, elderly management in hospitals, and consumer group positioning in shopping malls.

Radio Real Time Location Technology (RTLS)
The above RSSI perception positioning technology does not have positioning coordinates and cannot meet the needs of high-precision coordinate-level positioning. RTLS (Real-time Positioning System) technology emerges accordingly. The main radio performs distance measurement calculations, time difference calculations, angle calculations, etc. to achieve positioning. The main positioning algorithms are: TDOA (Time Difference of Arrival Positioning), AOA (Angle of Arrival Positioning), TOA (Time of Arrival), TW-TOF (Two-way Time of Flight), NFER (Near Field Electromagnetic Ranging), etc. Among them, the UWB frequency band (ultra-wideband radio frequency band, 6-8GHz) is found to be very suitable for positioning because of its pulse wave and high bandwidth. It has high positioning accuracy and is not susceptible to interference. In particular, Ubisense pioneered the global The first UWB positioning system, the UWB positioning system has only been used in various industries all over the world.
The country is also actively developing positioning systems. At the end of 2013, a company called Decawave in Ireland officially launched the DW1000 UWB radio frequency chip, which provides the basic part of the UWB positioning core. Since then, domestic Dunen Technology, Nanjing Woxu, Qingyan Technology, Companies such as Wuxi Zhenyuan and Shenzhen Mingguang have launched low-cost UWB positioning systems, but the current DW1000 chip yield rate is less than 60%, time calculations are unstable, and supporting capabilities are not enough, causing domestic derivatives to be very unstable. Some products are still unable to be actually used in the project.

Inertial Navigation Positioning Technology
The inertial navigation system uses the combination of gyroscopes, accelerometers and other motion sensors to realize single-terminal positioning without base stations. By providing the initial position and speed to the inertial navigation system, the information of the motion sensor is integrated and calculated, and the current position and speed are constantly updated. By detecting the acceleration and angular velocity of the system, the inertial navigation system can detect position changes (such as east or west movement), speed changes (speed magnitude or direction) and attitude changes (rotation around each axis), it does not require external references The characteristic of the dot makes it naturally free from external interference or deception.
The gyroscope is used to measure the angular rate of the system in the inertial reference frame. By integrating the angular rate with the initial position of the system in the inertial reference frame as the initial condition, the current direction of the system can be obtained at all times. This can be imagined as a blindfolded passenger sitting in a car, feeling that the car turns left, right, uphill, or downhill. Based on this information, he knows where the car is heading, but does not know whether the car is fast or slow. Or whether the car slid to the side of the road.
The accelerometer is used in the inertial reference frame to measure the linear acceleration of the system, but it can only measure the acceleration relative to the direction of the system’s movement (because the accelerometer is fixed to the system and rotates with the system, it does not know its own direction). This can be imagined as a blindfolded passenger squeezing the seat back when the car is accelerating, leaning forward when the car brakes, pressing the seat down when the car accelerates uphill, and the car bounces off the seat when it crosses the top of the mountain and goes downhill. With this information, passengers know how the car accelerates relative to itself, that is, forward, backward, up, down, left or right, but they do not know the direction relative to the ground.
By tracking the current angular rate of the system and the current linear acceleration measured relative to the motion system, the current linear acceleration of the system in the reference frame can be determined. Take the initial speed as the initial condition, apply the correct kinematics equation, and integrate the inertial acceleration to get the system inertial velocity, and then use the initial position seat as the initial condition to integrate again to get the inertial position. The small error of the inertial navigation system sensor will accumulate into a large error over time, and the error is roughly proportional to the time, so it needs to be continuously corrected. Modern inertial navigation systems use various signals (such as global positioning systems and magnetic compasses) to modify them, and use cybernetic principles to filter different signals to ensure the accuracy and reliability of the inertial navigation system.
Make a statistical table of the pros and cons of each positioning technology:

[ad_2]